

ロボットシステム構成図と各名称
ハンドリング仕様の場合
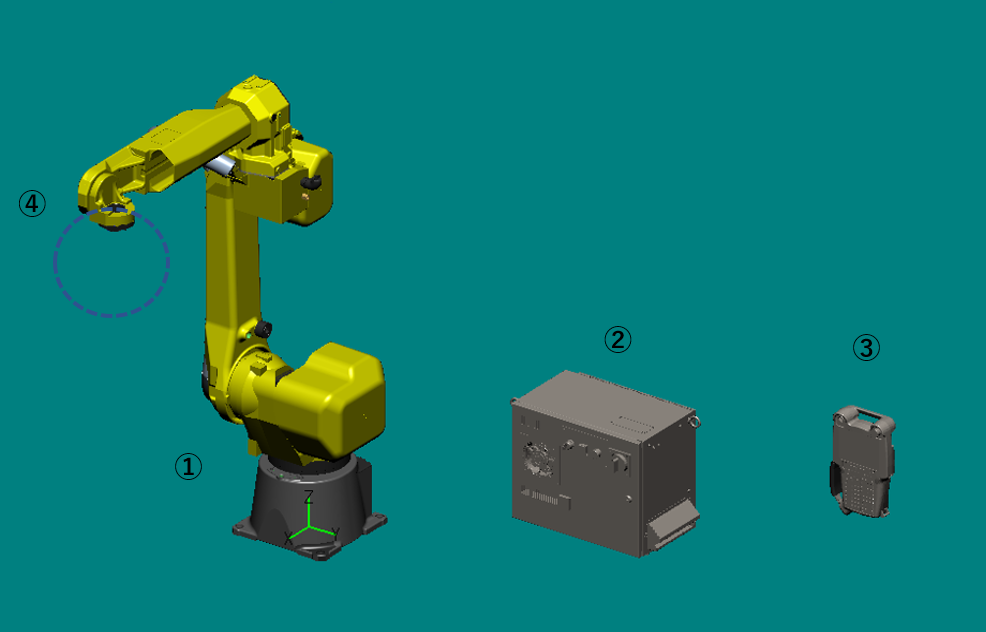
1
マニピュレーター(ロボット本体)
サーボモーターによる複数軸の多関節構造をとっており、設置面積を取らない割に動作範囲が広くなっています。動作はサーボモーターと減速機で精密かつ高速で動作しています。
2
制御装置(コントローラー)
サーボアンプや基盤などが入っています。電子機器が収納されているため、環境の良い場所へ設置する必要があります。
3
ティーチペンダント
ロボットの動作、設定、プログラムを入力するものです。また、入出力の状態やアラーム・エラー等を確認することができます。
4
ツール(エンドエフェクタ)
ハンドリングロボットに取付けられるツール(エンドエフェクタ)は作業工程により様々です。代表的なものを次項で何点か取り上げています。
ツール(エンドエフェクタ)の種類まとめ
ワークを挟込んで固定する機構のことを指し、把持力の発生方式には、エアー式、油圧式、電気アクチュエータ式などがあります。 定型品の搬送などに主に使用され、パレタイジング工程などに使用されます。
真空発生器による真空エアーを真空パッドにより吸着させて物体を運びます。物体に穴が開いていなければ(真空エアーが抜けなければ)搬送できるものの幅が広いことが特徴です。チャックではつかみきれない不定形品の搬送に使用され、ピック&プレイス工程に使用されております。
電磁石による電流の入切で物体を吸着させます。ただアルミや銅は吸着できなかったり、またステンレスはオーステナイト系はできない為、注意が必要ですが、複雑形状に対応でき、把持力が強いことが特徴です。重量物搬送工程で主に使用されております。
ツールはスピンドルやグラインダーなどが一般的ですが、一定の押し付け力が必要となる作業の為、併せて力覚センサーといわれるものを併用することが多くあります。 研磨、バフ掛け等が必要な金属加工業様で活用されています。
ネジ締め工程の自動化等に主に使用され、締め付けトルクを管理し、締め付け不良等が発生した際にも確認できるような機構となっているものが多くあります。半導体や自動車部品を製造しているメーカー様で活用されています。
アーク溶接・スポット溶接・レーザー溶接等、溶接と一言に言っても多様な方法がありますが、それぞれに応じたツールが存在し、幅広い溶接法に対応が可能です。 自動車部品や建材を製造されているメーカー様で活用されています。
アーク溶接仕様の場合
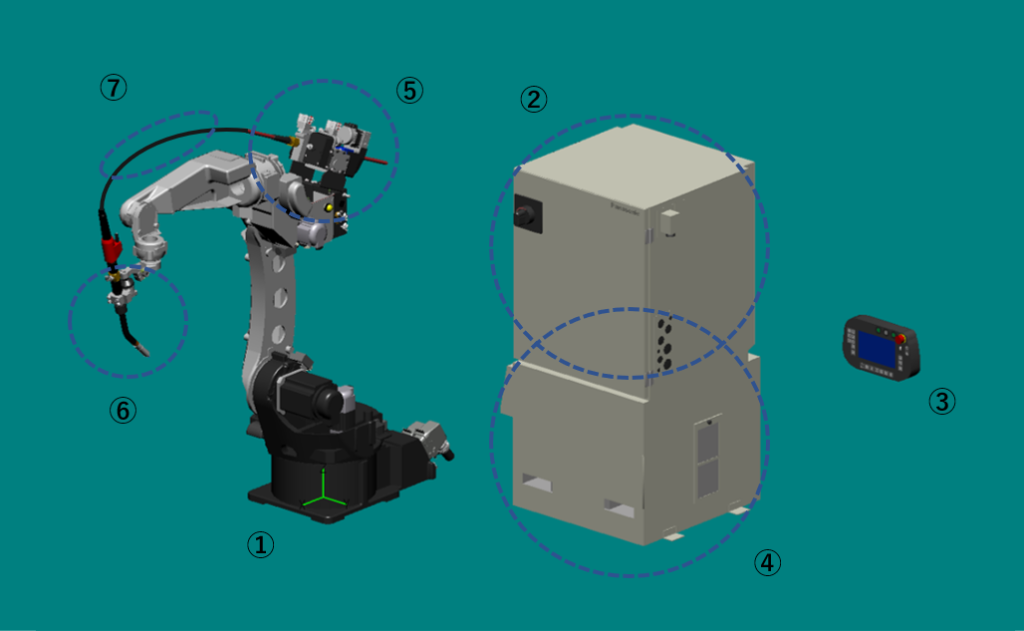
1
マニピュレーター(ロボット本体)
サーボモーターによる複数軸の多関節構造をとっており、設置面積を取らない割に動作範囲が広くなっています。動作はサーボモーターと減速機で精密かつ高速で動作しています。
2
制御装置(コントローラー)
サーボアンプや基盤などが入っています。電子機器が収納されているため、環境の良い場所へ設置する必要があります。
3
ティーチペンダント
ロボットの動作、設定、プログラムを入力するものです。また、入出力の状態やアラーム・エラー等を確認することができます。
4
溶接機(溶接ユニット)
ロボット用の溶接機は、人間に比べて溶接スピードが格段に速いため、高速アーク安定性能が必要不可欠です。
5
ワイヤ供給装置
デジタル溶接機やロボット融合溶接機では、送給モータにエンコーダが付いており、送給負荷が変わっても指令値通りの送給を保てる様になっています。
6
溶接トーチ
溶接が実際に行われる箇所。容量の大きい電流が流れるため、長時間連続して使用する場合にトーチが変形することもあります。この為、長時間溶接される場合は対策として、水冷トーチ等を活用される場合も御座います。
7
トーチケーブル
溶接用ワイヤー及び、溶接電流を流すケーブルを長時間使用し続けると、送給不良に繋がりますので定期メンテナンスが必要です。