
2012年08月22日
実学習
ショックセンサー内部のスプリング劣化による「位置ズレ」について
溶接トーチ保護の為に取付けられているショックセンサーは、衝突等の外部からの力が加わるとロボット保護機能が働きアームが後退します。その時センサー本体内部のスプリングによりトーチ自体が元に戻るような構造になっています。ところが長年使用していますと、スプリング自体の復元力が劣ってきてアーム移動時の振動等でトーチ自体の「ズレ」が生じ、「溶接の位置ズレ」を起こす要因となります。
<新品の写真> <古くなった写真>
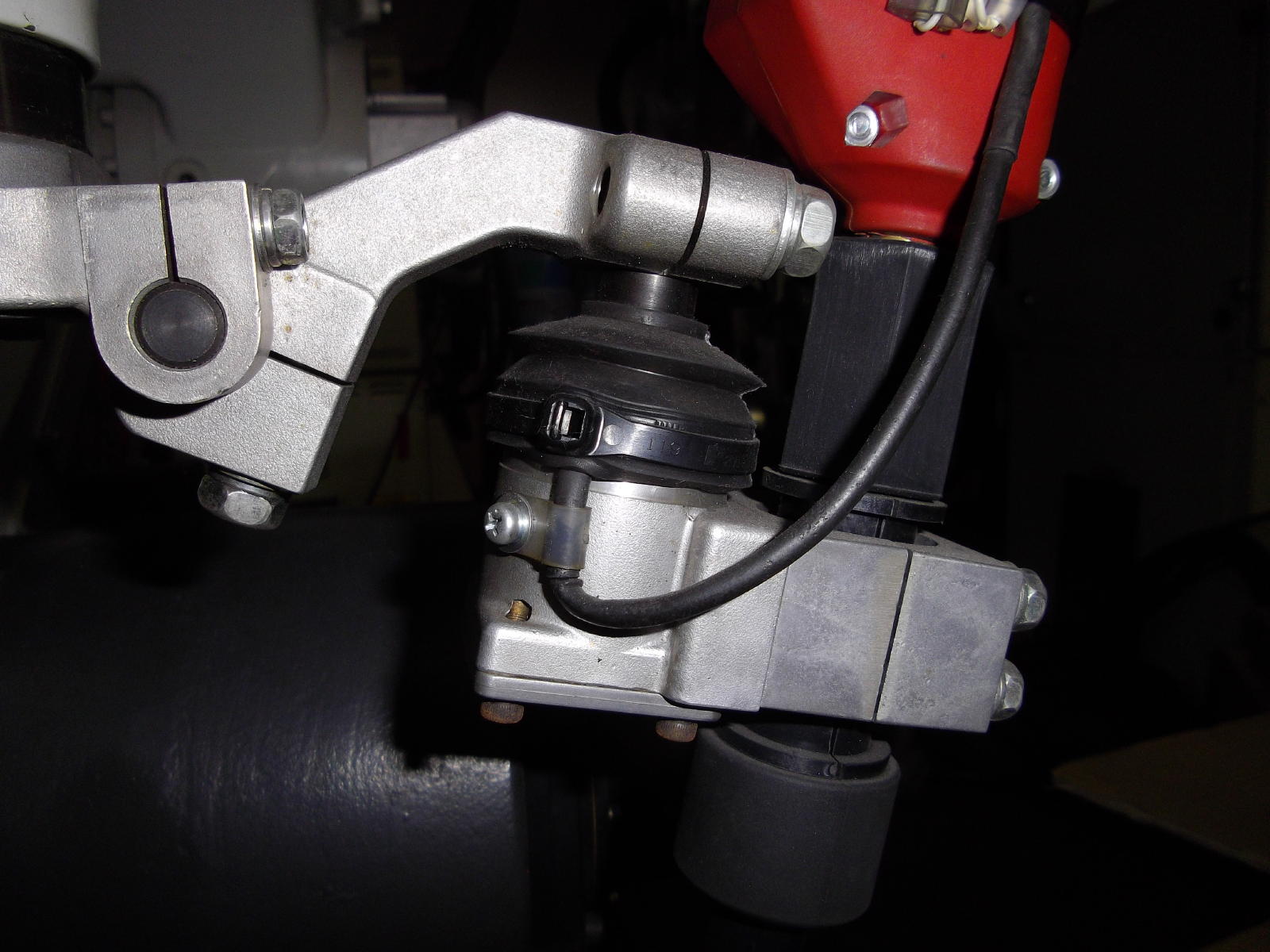

定期的にポイント先端とトーチ先端部の「ズレ」の距離を測ります
確認方法としては、定期的に固定された確認ポイント先端にトーチ先端を合わせロボットの電源を切り、トーチ部分に手で軽く力を加えて離しポイント先端とトーチ先端部の「ズレ」の距離を測ります。1mm以上のズレが生じている場合は、部品の交換が必要となってきます。