

Mechmindのプロフェッショナルによる
3Dビジョンカメラシステムのご提案
Mech-Mind(メックマインド)社の3Dビジョンシステムが、従来のビジョンシステムと一線を画し、
なぜ自動車業界で急速に採用が進んでいるのか。
その理由となる特徴を 40 以上の工程に導入してきた弊社の実績からわかる4つのポイントにまとめました。
▼ 1.「光沢物・黒色物」への圧倒的な対応力 ▼
自動車部品に多い鋳造品、プレス品、黒色の樹脂パーツは、従来の3Dカメラが最も苦手としていました。
反射や吸光により、正確な点群データが取得できず、十分な位置補正ができないからです。
Mech-Mindは、独自のHDRアルゴリズムと強力なプロジェクターを搭載しており、
反射の強い金属面や光を吸収する黒色ワークでも、ノイズの少ない高精細な3Dデータを生成します。
これにより、これまで「 ビジョンカメラの限界 」で諦めていた工程の自動化が可能となっています。
▼ 2. AI(ディープラーニング)による「学習型」認識 ▼
従来のビジョンシステムは、形状を一点一点プログラミングする「パターンマッチング」が主流で、
重なり合ったワークや個体差のある部品の認識には限界がありました。
Mech-MindはAIエンジンを標準搭載しており、「重なり」「ランダムな積み出し」「複雑な形状」を、
学習させれば人間が目で見るような感覚で判別でき、成功率の高いピッキングが可能となります。
また品種追加の際、新規でプログラムを作成せず、AI学習にて立ち上げ時間を大幅に短縮できます。
▼ 3.「ソフトウェア・ファースト」によるエンジニアリング工数の削減 ▼
導入時及び導入後の運用面で最も気にされる「導入・保守コスト」に直結するのが、この点です。
Mech-Mindはカメラ単体ではなく、強力なソフト(Mech-Vision / Mech-Viz)を提供しています。
・Mech-Vision: プログラミング不要のGUIベースで、画像処理フローを構築。
・Mech-Viz: ロボットの経路生成を自動で行い、周辺設備との干渉回避もシミュレーション上で完結。
これにより、これまで外部の設備屋に頼り切りだった「ビジョンティーチング」の大部分を内製化、
あるいは大幅な工数削減を実現します。
▼ 4. コストパフォーマンスが高い ▼
欧州や国内のビジョンメーカーと比較しても、性能を維持しつつ導入コストを抑えられるため、
ROI(投資回収率)の計算が立ちやすいのも大きな武器になります。
また主要なロボットメーカー(ファナック、安川電機等)との通信プロトコルを標準装備しているため、
既存ラインへの追加導入もスムーズです。
このようなメリットを持つMechmind製のビジョンカメラを弊社ではラボに保有しております。
「本当にうちの部品でも見てピッキングできるのか」と気になる方は実際のワーク(または3Dデータ)を預かり、認識率とシミュレーション上のサイクルタイムを算出したレポートいたします。そのうえで、最適な自動化システムのご提案も併せてさせていただきますので、お気軽にお問合せください
Mechmindの導入検討で
このようなお困り事はございませんか?
導入したいが、
使い方が複雑そう
カタログスペック通りの
ピッキングができるか不安
他メーカーと比較して
本当の性能差がわからない
グラフィックインターフェースの
直観的な操作感で運用も簡単
弊社ラボでの事前検証で
実際の性能を確認
他メーカーと同条件の検証で
性能さを正しく比較
導入したいが、
使い方が複雑そう
グラフィックインターフェースの
直観的な操作感で運用も簡単
カタログスペック通りの
ピッキングができるか不安
弊社ラボでの事前検証で
実際の性能を確認
他メーカーと比較して
本当の性能差がわからない
他メーカーと同条件の検証で
性能さを正しく比較
Mechmindを活用した自動化システムの事例・実績
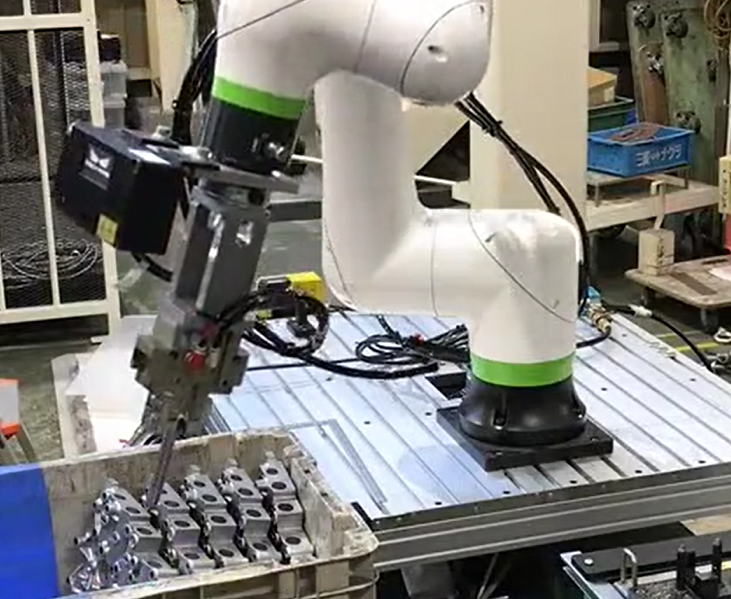
クランクシャフト部品のばら積ピッキング

▼ 1. 導入の背景と課題
ある大手自動車部品メーカーでは、加工ラインへのクランクシャフト供給を人手で行っていました。重量物であるため作業者の身体的負荷が大きく、
さらにワーク同士が複雑に重なり合う「ばら積み」状態からのピッキングは、従来のビジョンカメラでは認識ミスや衝突が頻発し、自動化が困難でした。
▼ 2. 課題への解決方法
本システムでは、高精度3Dカメラ「Mech-Eye」をロボット上部に設置。クランクシャフト特有の強い金属光沢によるハレーションを抑えるため、
独自のHDRアルゴリズムを活用しました。
・高精細な点群データ: 反射の強い加工面と暗い鋳造肌が混在していても、ノイズの少ない正確な3D形状を復元。
・AIによる位置姿勢認識: 重なり合った複雑なワークの中から、最も取り出しやすい個体をAIが瞬時に判別します。
・自動干渉回避(Mech-Viz): ロボットアームやハンドが、ビンの縁や他のワークに衝突しない経路を自動で計算。
▼ 3. 導入効果
・労働環境の改善: 24時間稼働のラインにおいて、重量物の投入作業を完全に無人化。
・高い安定性: ランダムな積み状態からでも、認識エラーによるライン停止を極限まで低減。
・段取り替えの迅速化: 新形状のワーク導入時も、CADデータを読み込ませるだけで設定が完了するため、準備工数を大幅に削減しました。
バルブボディの整列ピッキング
▼ 1. 導入の背景と課題
バルブボディは、無数の油圧穴や複雑な凹凸を持つ大型ワークであり、
さらにアルミダイカスト特有の「鈍い光沢」と「鋳巣・バリ」などの個体差があります。
従来のビジョンでは、複雑すぎる形状ゆえに点群データが正確に重ならず、誤認識やピッキングミスが多発していました。
また、重量があるため、把持位置のわずかなズレがロボットの異常停止(過負荷)に直結していました。
▼ 2. 課題への解決方法
本システムでは、広視野と高精度を両立した「Mech-Eye Pro Enhanced」を導入しました。
「面」で捉える高精細点群により複雑に入り組んだ油圧回路の溝や、小さなネジ穴までを忠実に3Dデータ化。
アルミ特有の光の乱反射を抑えるアルゴリズムにより、エッジの欠損を防ぐことができました。
・AIによる「特徴点」の抽出: ワークが裏返りや斜めの重なりも、AIがCADデータと照らし合わせ、瞬時に重心と最適な把持ポイントを特定します。
・重量物を考慮した動作計画: ワークを抜き出す際、周辺のワークやビンの壁に「こすらない」ルートを自動計算。
▼ 3. 導入効果
・安定稼働の実現: 難易度の高い「重なり合ったバルブボディ」のピッキング成功率が飛躍的に向上し、ラインの無人化を達成。
・サイクルタイムの最適化: AIの高速処理により、ピッキング判断時間を短縮。人の手作業と同等以上のタクトタイムを実現しました。
・品質の安定: ビジョンによる「仮置き姿勢」の確認工程を組み込むことで、後続の加工機への投入精度が向上し、不良率の低減に寄与しました。
パイプ材の切削加工機への高精度自動投入

▼ 1. 導入の背景と課題
自動車の足回りや吸排気系に使用されるパイプの切削工程では、パイプがに重なり合っています。
課題: 従来のカメラではパイプの中心軸を正確に捉えられず、ロボットが掴み損ねたり、斜めに把持したりするトラブルが頻発していました。
また掴み位置が数ミリずれるだけで、加工機のチャック(固定部)挿入時に衝突し、高価な刃具やスピンドルを破損させるリスクがありました。
▼ 2. Mech-Eye PRO Sによる技術的解決
近接・高精度撮影に特化したPRO Sを、ロボットアーム先端へ設置しました。
微細な隙間の識別: パイプの「円筒形状」を極めて滑らかな点群データとして復元。中心軸と端面を極めて高い再現性で特定します。これにより重なり合ったパイプ同士のわずかな隙間をPRO Sの高解像度で見極め、AIが「今、最も安全に掴める1本」を選別します。
▼ 3. 導入効果
・セット精度の劇的向上: 挿入ミスによる設備停止(チョコ停)がほぼゼロになり、加工機の稼働率が15%向上。
・刃具寿命の延長: 常に正しい位置・角度でワークがセットされるため、加工開始時の負荷が安定し、刃具の欠損リスクを低減。
・スペースの有効活用: PRO Sのコンパクトさを活かし、既存の狭い加工ライン内でも干渉なくロボットシステムを構築できました。
ご利用の流れ
お問合せ
Mechmindを活用して
自動化したい工程をヒアリング

構想・ご提案
ヒアリング内容を基に
最適なカメラと構想をご提案

お見積り
構想を基にお見積書を提出

発注
発注書の授受

システム設計・製作
短納期でのシステム設計・製作
