
ティーチング
ファナック製を含む産業用ロボット・協働ロボットは取り付けるツールを変えることで様々な工程に対応できるその高い汎用性によって、搬送・切削・検査・溶接等の様々な作業を行うことができます。その為にはティーチングといわれる「 ロボットに動作を教え込む作業 」が必要となります。
ただこの作業はロボットの動作の方法だけを知っていればできるものではなく、
ロボットが行う搬送・切削・検査・溶接等の作業自体への知識と理解が重要となります。
ですのでロボットティーチングを行う方は、ロボット操作に関する十分な知識・経験と自動化する作業に関する十分な知識・経験を持っているプロフェッショナルでなければ、ロボット本来の持つ十分な性能を発揮させることができません。
産業用ロボットのティーチングに携わって40年以上で計10,000台以上のロボットのティーチングを行ってきた弊社が
加工機へのワークの投入・排出、パレットへのワーク整列、2Dや3Dビジョンを活用したワーク搬送又は外観検査、スポット溶接作業、アーク溶接作業、バリ取り作業等のどんな工程のティーチングであってもお客様に代わりティーチングを行います。
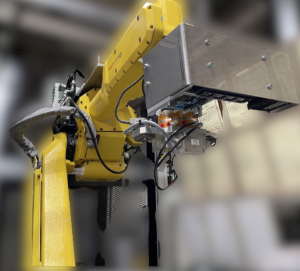
事例1.NC旋盤からのワーク投入・取り出し・整列作業

作業内容
NC旋盤からのワーク投入・取り出し・整列
概要
愛知県の受託加工業様で、NC旋盤からのワーク投入・取り出し・整列自動化工程において、
エンドエフェクタに搭載された位置補正用の2Dビジョンカメラを活用してティーチングを実施致しました。
カメラの情報によってロボットの動作を変える為の演算をティーチングプログラムに組み込むことはもちろん、
NC旋盤からの信号授受もティーチングに組み込むことで、お客様のご要望通りの作業を行っております。
2Dビジョンはもちろん、3Dビジョンを使用したティーチングも弊社では対応させて頂きますので、
アプリケーションを活用したティーチングのご依頼もお気軽にお問い合わせください。
事例2.自動車部品の3Dビジョンを活用したばら積みピッキング
作業内容
製品のばら積みピッキング
概要
自動車用部品を製造されているユーザー様より、FANUC製3Dビジョンを活用した製品のばら積みピッキング作業を行っているシステムで、
導入当初に比べてピッキングの成功率が大幅に低減しているとのことで改善依頼を頂き、作業を実施させて頂きました。
まず初めにビジョンで最も重要といっても過言ではない、露光時間・画像サイズ・ゲイン・キャリブレーション等といった
カメラのパラメータの設定を確認し正しい数値に変更させて頂きました。その後、ロボットの動作についても変更させて頂くことで
ピッキング成功率が大幅に改善しました。
FANUC製ビジョンシステムのティーチング改善等についてはお気軽にお問合せ下さい。



お問い合わせフォーム
CONTACT